

宇树人形机器人在行业内表现突出,具备较高的技术水平。针对转手绢操作的机器人技术,其实现面临诸多挑战和较高的难度。机器人需要精确控制手臂的灵活度和协调性,完成转手绢这样的精细操作。机器人还需要具备智能识别和学习能力,以适应不同环境和操作需求。综合来看,宇树人形机器人在转手绢操作方面的技术实力反映了其在行业内的领先水平。
本文目录导读:
随着科技的飞速发展,人形机器人在众多领域的应用逐渐普及,作为人形机器人领域的重要代表之一,宇树人形机器人以其卓越的技术和创新能力,在行业内树立了良好的口碑,本文将围绕宇树人形机器人在行业内的水平以及转手绢这一操作在机器人技术中的实现难度进行深入探讨。
宇树人形机器人在行业内的水平
1、技术研发与创新
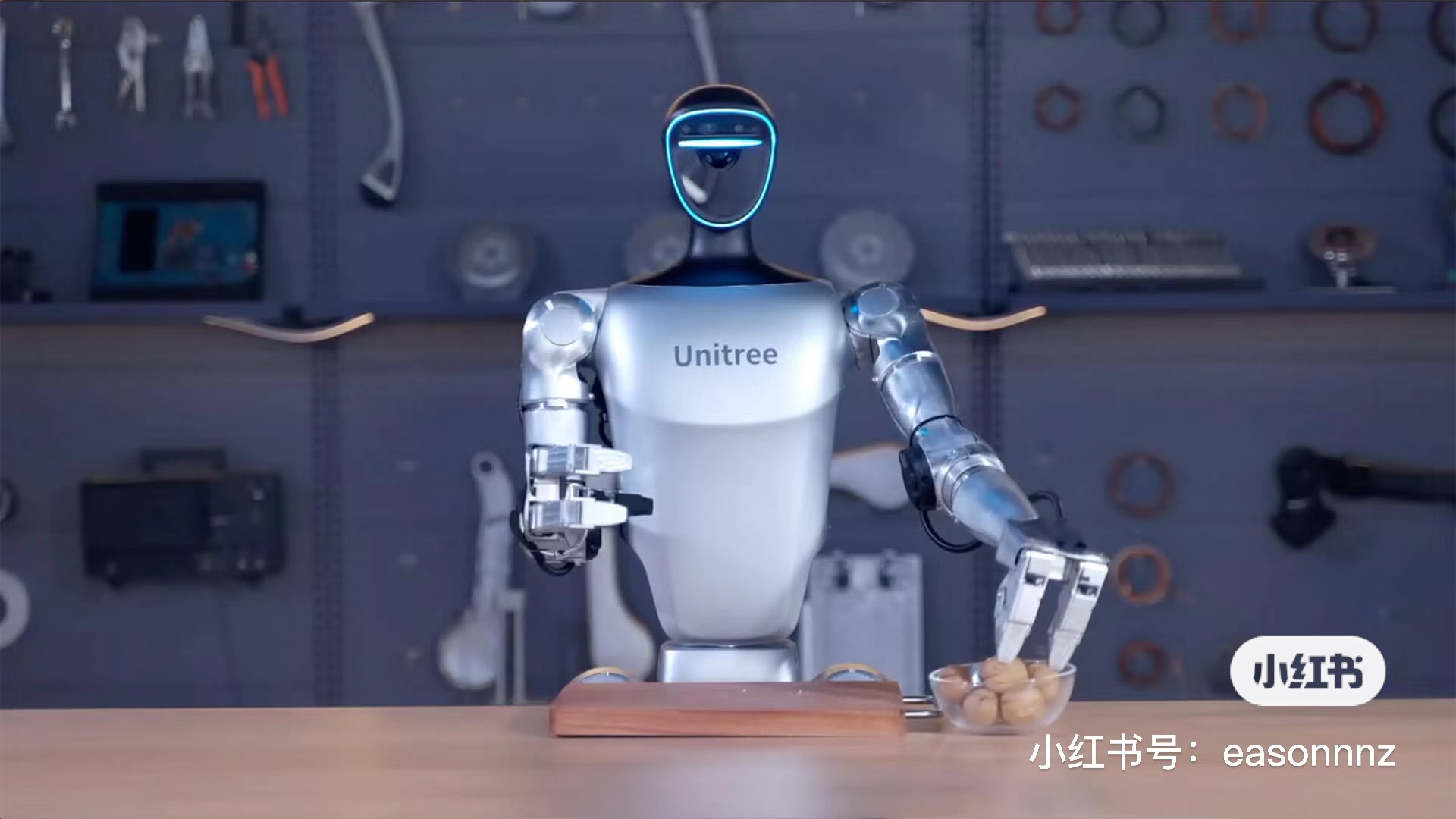
宇树人形机器人在技术研发与创新方面表现出色,其设计独特,集成了先进的机械、电子、计算机、人工智能等多个领域的先进技术,在算法、控制系统、传感器等方面,宇树人形机器人不断进行技术突破,提升机器人的运动性能、智能水平及人机交互能力。
2、实际应用表现
宇树人形机器人在实际应用中表现出较高的水平,在救援、巡检、服务等领域,宇树人形机器人凭借其强大的环境适应性和灵活性,能够完成各种复杂任务,宇树人形机器人在舞蹈、娱乐等领域也有出色表现,展示了其高度的动作控制精度和灵活性。
转手绢操作在机器人技术中的实现难度
1、技术挑战
转手绢操作对于人形机器人来说具有一定的技术挑战,转手绢需要机器人具备较高的动态平衡能力,以便在转动过程中保持稳定的姿态,转手绢操作需要精确的控制算法,以实现手绢的精确转动和定位,视觉识别技术也在此类操作中发挥着重要作用,机器人需要识别手绢的位置和状态,以便进行精确的控制。
2、实现难度
实现转手绢操作的人形机器人需要克服诸多技术难题,需要解决机器人的动态平衡问题,这需要对机器人的控制系统进行精确调整和优化,需要开发精确的控制算法,以实现对手绢的精确控制,视觉识别技术的精度和速度也是实现这一操作的关键,还需要对机器人进行大量的实验和调试,以确保其在实际操作中表现出色。
宇树人形机器人实现转手绢操作的可行性
1、技术基础
宇树人形机器人在技术研发与创新方面具备较强实力,拥有先进的机械、电子、计算机、人工智能等技术基础,宇树人形机器人在实现转手绢操作方面具有较大的技术优势。
2、实践经验
宇树人形机器人在实际应用中表现出较高的水平,积累了丰富的实践经验,这些经验为其在实现转手绢操作方面提供了宝贵的参考和借鉴。
3、挑战与机遇并存
尽管宇树人形机器人在实现转手绢操作方面面临一定的挑战,但机遇与挑战并存,通过不断的技术研发和创新,宇树人形机器人有望克服这些挑战,成功实现转手绢操作。
宇树人形机器人在行业内具有较高的水平,具备实现转手绢操作的技术基础和实践经验,虽然这一操作在机器人技术中存在一定的挑战,但宇树人形机器人通过不断的技术研发和创新,有望成功实现这一操作,这将进一步拓展人形机器人在救援、服务、娱乐等领域的应用,推动人形机器人技术的持续发展。
 沪ICP备2020033849号-17
沪ICP备2020033849号-17